Rikki's Portfolio
Projects
About
Contact
Portfolio
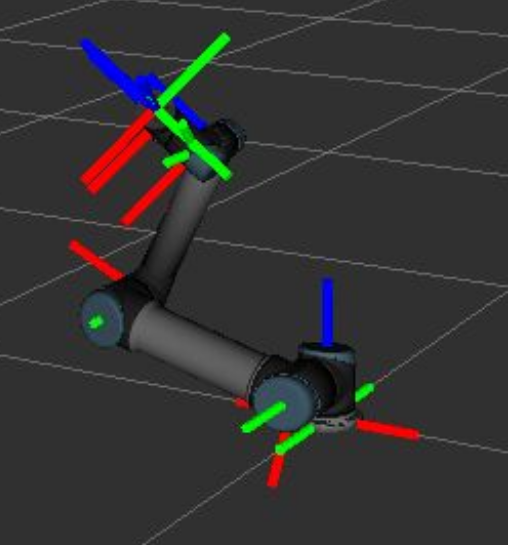
Kinodynamic Trajectories
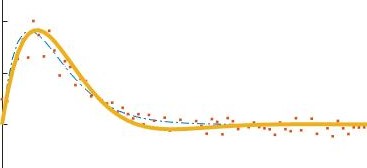
Real-time System Identification
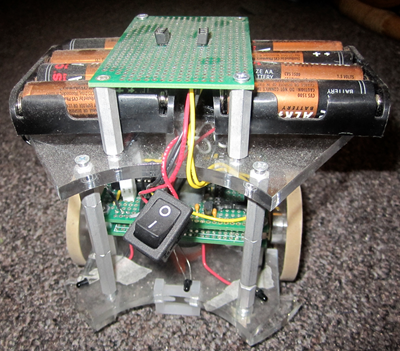
Robockey
D1GIT
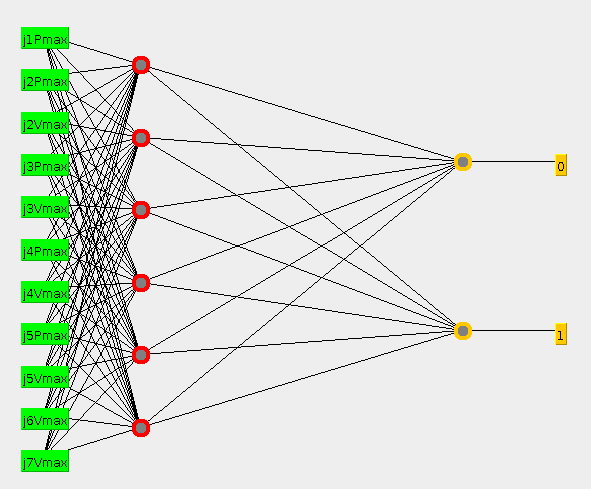
Improving Baxter Robot Catch Success with Neural Nets
Sphero control
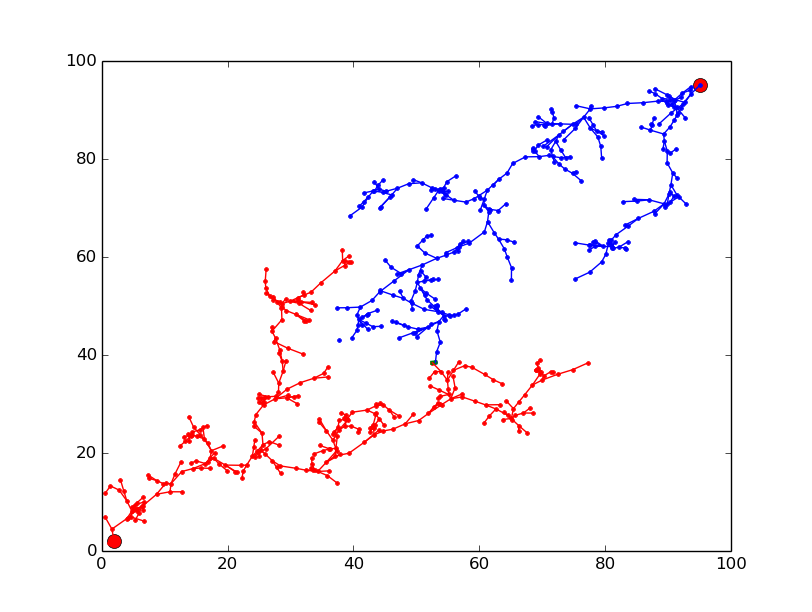
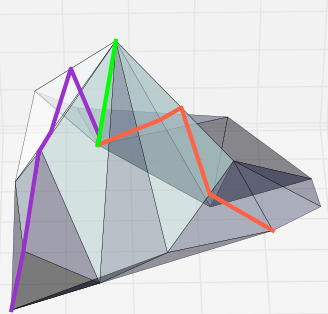
Weighted Terrain Meeting Point
Baxter Pick and Place
Dynamic Gymnast
Robotics Library