Weighted Terrain Meeting Point
2015-11-20 00:00:00 +0000
Overview
This project was part of the course EECS 495, Computational Geometry, at Northwestern University. The goal of the project was to implement an algorithm to calculate the meeting point of scattered robots on weighted terrain surfaces, based on the algorithm detailed in this paper by Mark Lanthier, Doron Nussbaum, and Tsuo-Jung Wang.
The algorithm consists of three main parts:
All of the code for this project is hosted on this page.
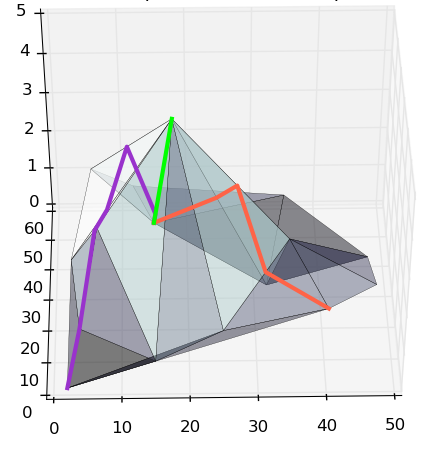
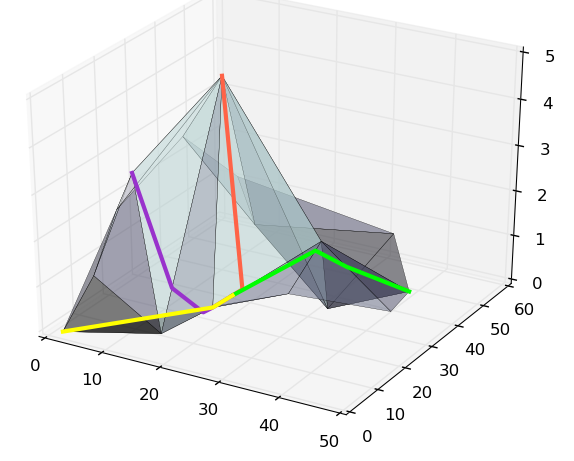
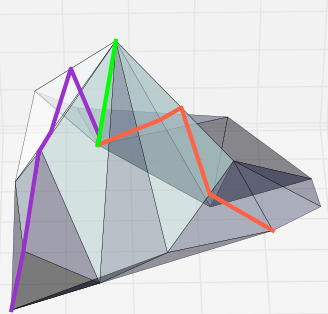
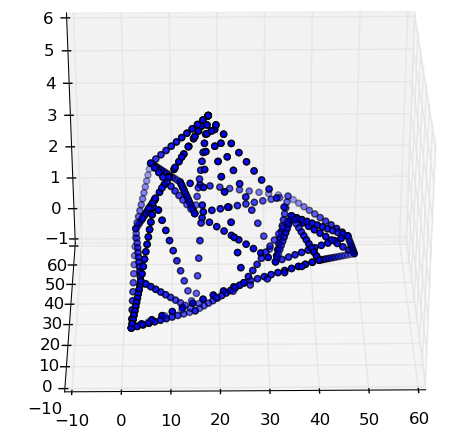
The triangulation of a sample terrain:
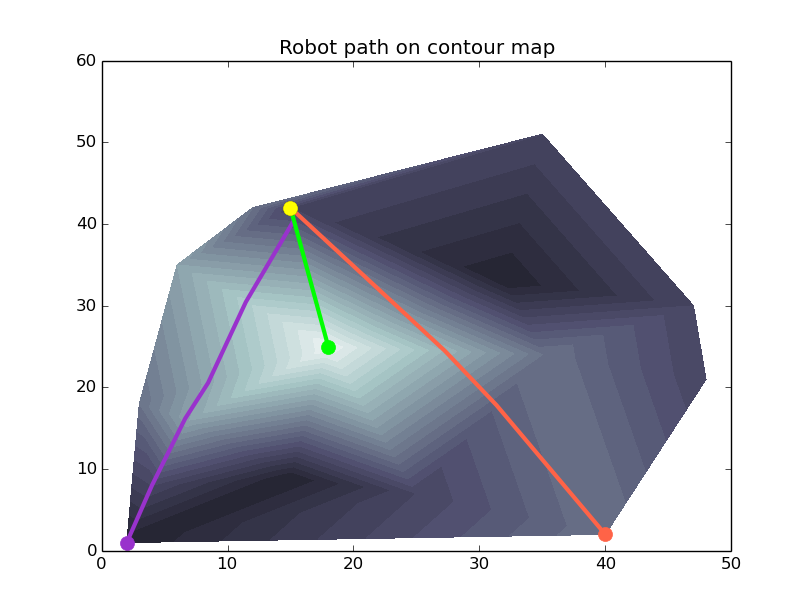
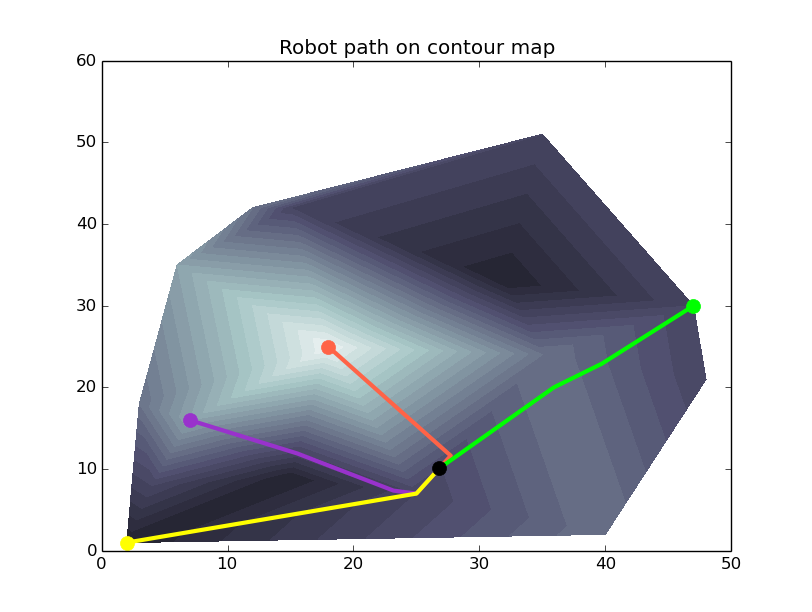
Two examples of found meeting points for robots starting at random vertices. The contour map is shown with the start locations of each robot displayed as a circle of the robot’s color, each robot’s path in a different color, and the calculated meeting point shown as a black circle.